
En France, le transport de marchandise est majoritairement routier : 88% du fret est effectué par des poids lourds, soit 600 000 camions en 2020. En 2019, toujours en France, 31% des émissions de gaz à effet de serre proviennent du transport routier. Les gaz à effet de serre ont un effet sur le réchauffement de l’atmosphère et sur les changements globaux qui touchent la planète.
Les bateaux employés pour le transport de marchandises posent aussi des problèmes d’ordre environnemental. Les moteurs à combustion qui équipent ces bateaux sont souvent alimentés avec du carburant peu raffiné et de mauvaise qualité. Cela favorise la production de particules fines et polluantes.
Arvag tente de fournir une alternative au transport routier en développant un projet de caboteur de proximité reliant les ports de la côte atlantique, de Brest à Bordeaux. L’objectif de nos recherches en tant qu’étudiant.e.s environnementalistes est de trouver et présenter des façons d’appréhender la conception du bateau de manière plus écologique et donc moins impactante pour l’environnement.
Le mode de propulsion
Une question de première importance sur ce type de projet est le mode de propulsion qu’utilisera ce bateau, entraînant le minimum d’impact environnemental. Notre choix se porterait sur une propulsion hybride, comportant un moteur ainsi qu’une voile.

Moteur
Deux options ont été envisagées au sujet des moteurs : électrique ou biodiesel.
Les moteurs électriques sont des alternatives aux moteurs diesels qui entraînent des émissions carbonées. Toutefois, un moteur électrique nécessite des matières premières, telles que le lithium ou le vanadium, des métaux utilisés dans les batteries. Ces matières premières sont coûteuses et leur impact environnemental pose question. En effet, le lithium est l’un des polluants les plus courants et sa présence a augmenté ces dernières années : les batteries des véhicules électriques devraient produire 340 000 tonnes métriques de déchets d’ici 2040. La production croissante de ces déchets, leur élimination incorrecte et les stratégies de recyclage inefficaces pour leur élimination entraîneront le rejet de Li dans les systèmes aquatiques.
Les biocarburants sont des carburants de substitution obtenus à partir de différentes sources de biomasse. La bioessence ou bioéthanol est de l’éthanol obtenu par fermentation des végétaux (blé, betterave sucrière, …) et mélangé avec de l’essence. Le biodiesel est produit à partir d’huiles végétales (plantes oléagineuses) ou de graisses animales et est mélangé à du diesel. L’algocarburant fait partie du biodiesel. Il peut être produit avec des algues et son rendement est également plus efficace que celui des plantes oléagineuses classiques (tournesol, colza…). Ces transformations sont souvent associés à des émissions de CO2.

Voile
Le vent étant une énergie gratuite et renouvelable, l’ajout de voiles sur le bateau permettrait d’en profiter tout en consommant moins de carburant. Plusieurs projets de différentes entreprises pourraient être envisagés.
La voile Wisamo de chez Michelin est une installation composée d’un mât contenant une voile gonflable et des souffleries. Le gonflage de la voile et sa rétractation durent 4 minutes et l’ensemble des opérations est automatisé. Elle s’oriente seule par rapport au vent et se replie quand il y en a trop.
L’aile Seawing de chez Airseas ressemble à une aile de kitesurf et se déploie à l’avant du bateau pour le tracter. Elle est plutôt prévue pour remorquer des cargos jusqu’à 300 m de long mais elle pourrait être adaptée pour les bateaux plus petits.
Un bateau vert

Antifouling
Tous les bateaux protègent leur coque avec une peinture dite antifouling afin d’éviter que la coque ne soit colonisée par un biofilm, attirant des bactéries et algues, qui vont entraîner l’arrivée d’autres organisme, comme des balanes, des moules et bien d’autres. La lutte contre la bioaccumulation ne peut donc pas être négligée : 1 à 2 mm d’organismes sur la coque font perdre jusqu’à 15% de la vitesse du bateau, entraînant une surconsommation de carburant pouvant atteindre 50%.
Les peintures antifouling classiques sont efficaces mais contiennent des biocides (qui tuent les organismes et se diffusent dans l’eau). Dans le cadre de ce projet, nous aimerions trouver une peinture d’antifouling sans biocides.
Il existe dans le commerce des peintures antifouling à base de silicone ayant des propriétés antiadhésives, mais celles-ci relâchent des huiles qui peuvent entraîner des anoxies et faire suffoquer des organismes.
D’autres recherches ont montré l’efficacité de certaines molécules pour leurs propriétés antifouling, mais n’ont pas mené à la prod de peinture (projet BIOPAINTROP, molécules produites par les éponges, enzymes, l’indole ou la chalcone).

Traitement des eaux
Au sujet du traitement des eaux sur le bateau, nous avons eu différentes idées. La seule qui nous paraît envisageable, mais reste à approfondir, est le traitement des eaux usées en fond de cale en intégrant une station d’épuration à bord (EPURA ONE par exemple). Si on ne met pas de station d’épuration à bord, il faut pouvoir vider les eaux usées dans les différents ports. Il faut alors trouver quels ports proposent des stations de pompage des eaux usées.
Equipements embarqués
Le projet Arvag a pour ambition de soutenir, si possible, à des projets scientifiques en embarquant du matériel pour différents prélèvements. Les protocoles suivants correspondent aux manipulations que nous avons retenues comme étant compatibles avec le projet Arvag.
Fish & Click
Fish & Click est une application issue d’un projet de sciences participatives visant à collecter des données concernant les engins de pêche perdus ou abandonnés. La contribution à l’application Fish & Click pourrait être très intéressante sachant que le caboteur passe forcément par des ports où des endroits fréquentés par les bateaux de pêche. Tant qu’on a accès aux coordonnées, il n’y a pas besoin de réseau ni d’une connexion internet. Ce protocole est à notre avis tout à fait compatible avec le projet, étant donné qu’avec de la rigueur, la manipulation est facile à faire en mer, rapide et ne demande pas de changements du parcours du navire. La procédure pour déclarer du matériel perdu demande de la rigueur et se compose des étapes suivantes.
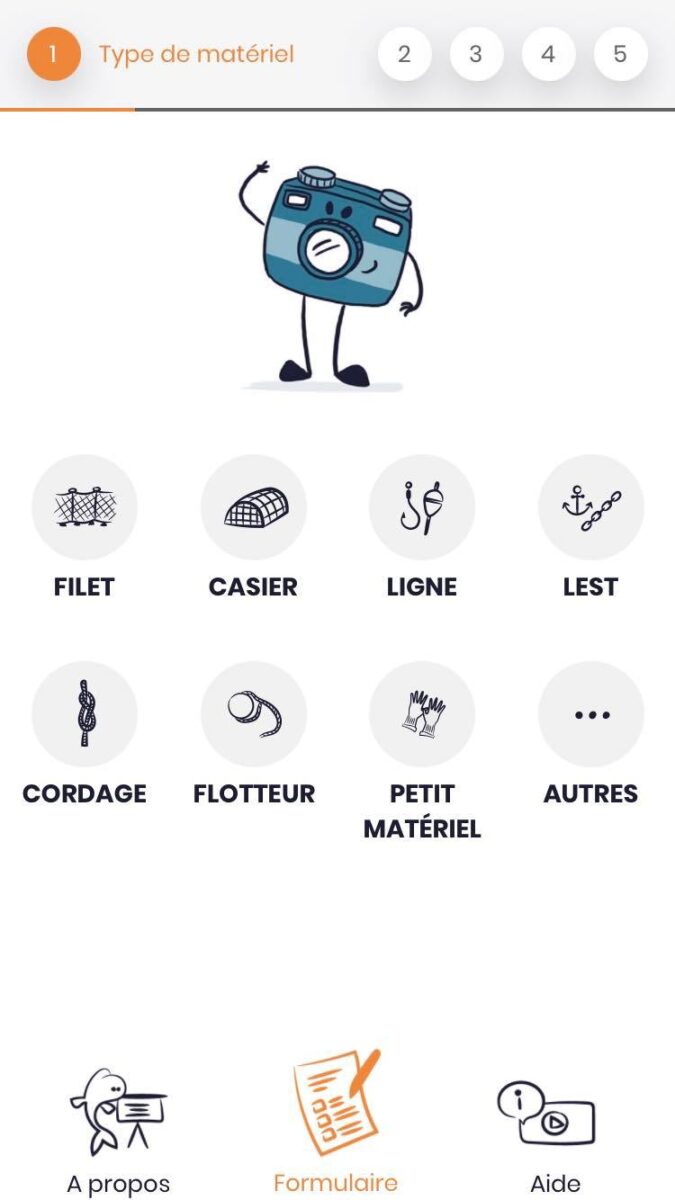
1 – Cocher la/les case(s) correspondant au type de matériel perdu puis déplacer le curseur en fonction du nombre d’entités trouvées (si possible indiquer les spécificités du matériel trouvé : est-ce un casier à crustacés ou une nasse à poissons ?)
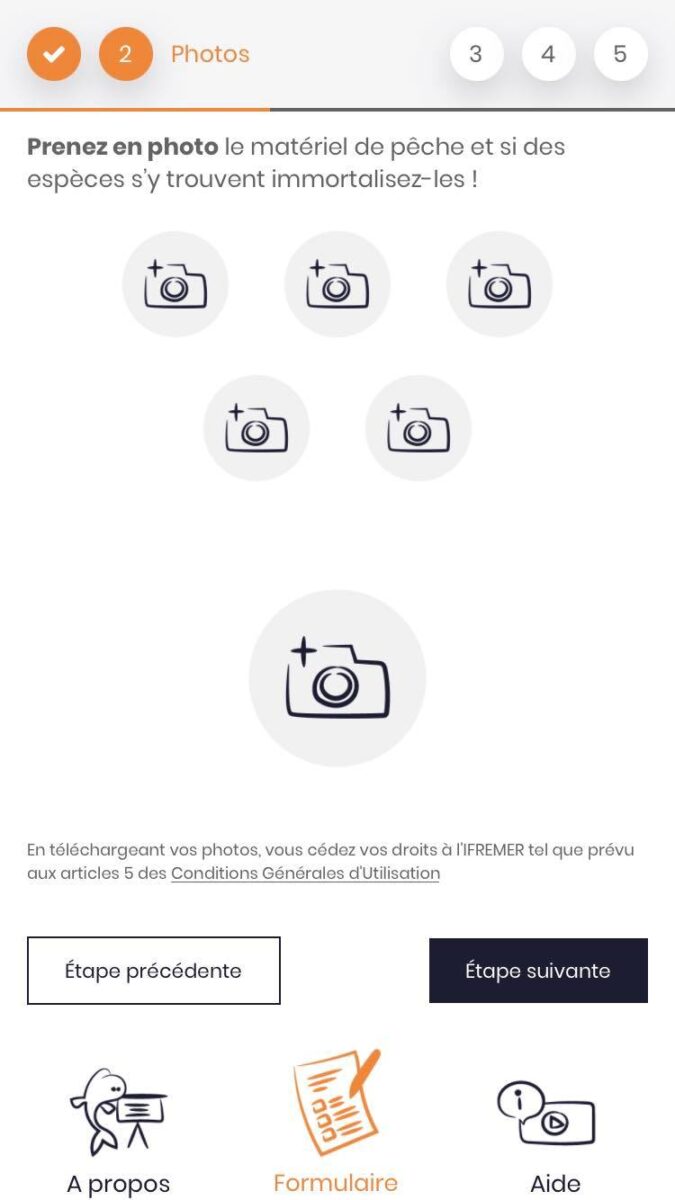
2 – Si des espèces sont prises au piège dans le matériel trouvé, prendre une photo (on peut uploader jusqu’à 5 photos).
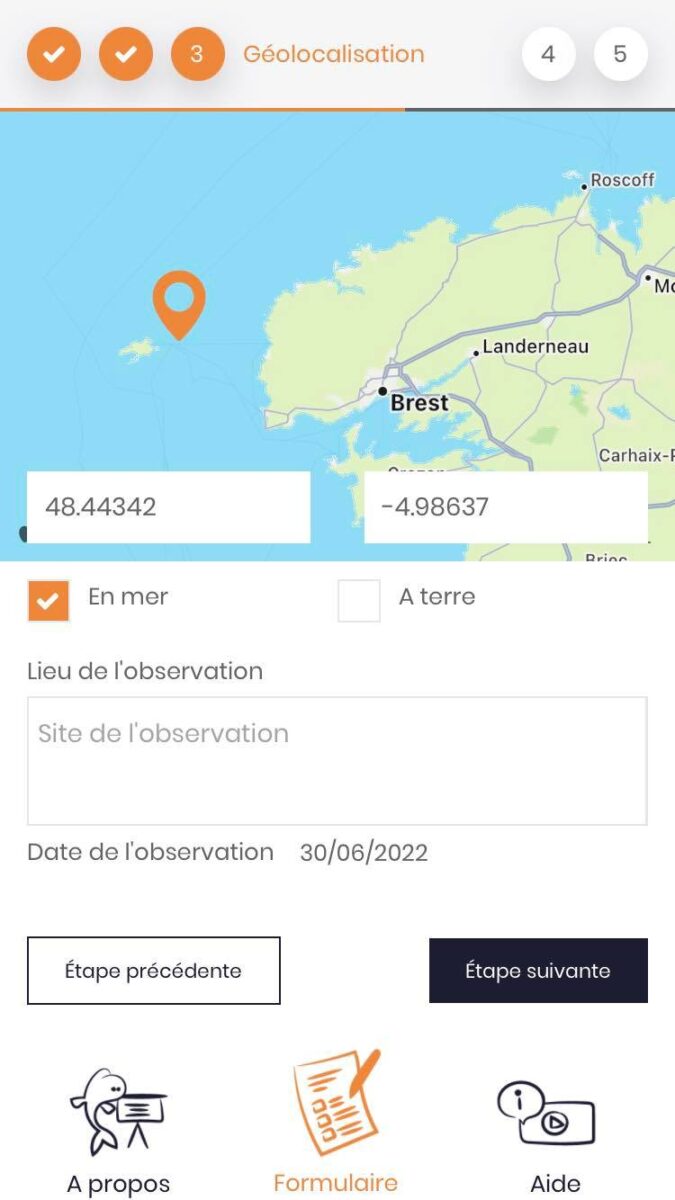
3 – Renseigner la longitude et la latitude de l’endroit où a été retrouvé le matériel, indiquer si l’observation a été réalisée en mer ou sur terre, si possible indiquer le site de l’observation. La date est automatiquement réglée sur la date du jour, mais peut être modifiée via un petit calendrier.
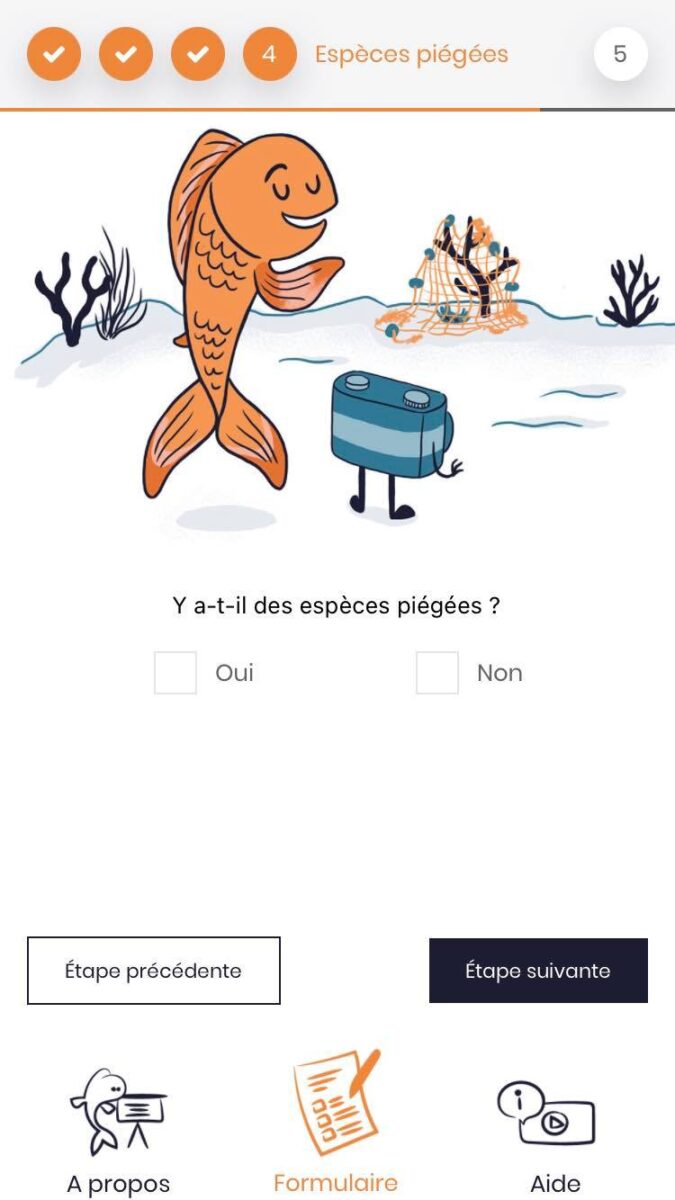
4 – Selon s’il y a des espèces piégées (cocher « oui« ), on peut cocher une case correspondant au type d’organisme : “poisson”, “crustacé” ou “autre”, et contenant différents choix (par exemple, si on coche “poisson”, les choix proposés sont : congre, tacaud, vieille, merlan, merlu, lieu, daurade, autres) ainsi qu’une zone de texte permettant d’ajouter d’autres espèces (ou “je ne sais pas”).
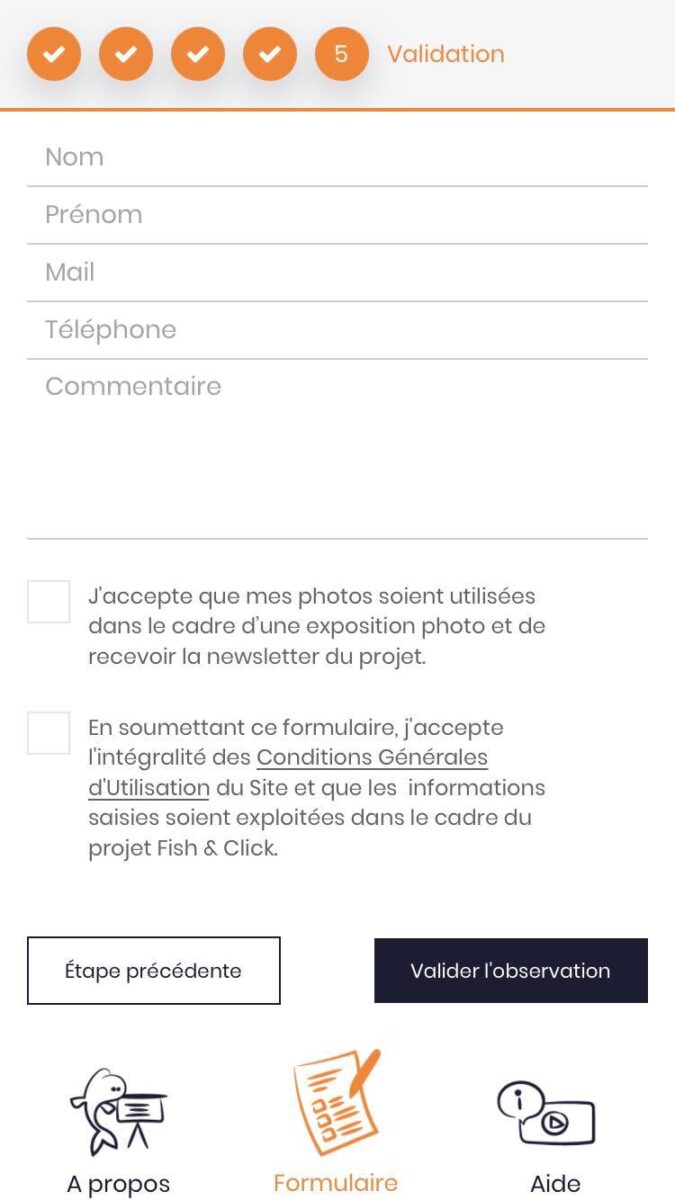
5 (validation) – Renseigner ses coordonnées et, si nécessaire, des commentaires. Ensuite, il y a deux cases à cocher : la première, facultative, concerne l’utilisation des photos téléversées dans le cadre d’une exposition et l’abonnement à la newsletter du projet Fish & Click ; la seconde, obligatoire, porte sur les conditions générales d’utilisation. Pour terminer le dépôt de données, il faut cliquer sur un bouton “valider l’observation”.
Prélèvements d’eau
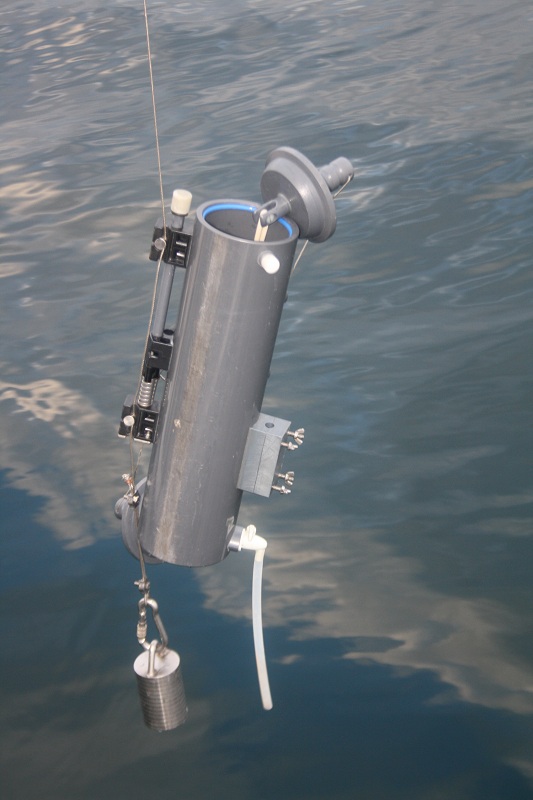
Les prélèvements d’eau s’effectuent en surface ou plus en profondeur, et ce à l’aide d’une bouteille de type Niskin. Le protocole débute par la fixation de la bouteille sur un câble et de l’immerger à la profondeur souhaitée ,en gardant les deux extrémités ouvertes pour permettre l’entrée d’eau. Une fois la bouteille placée, un messager (poids en laiton) est attaché au du câble et lâché afin qu’il glisse le long du câble par gravité jusqu’à ce qu’il heurte un bouton, déclenchant la fermeture rapide des deux extrémités, piégeant l’eau pour les échantillons.Il faudra alors ajouter à la conception du bateau une façon de pouvoir placer la bouteille une fois remplie pour effectuer les prélèvements des différents paramètres, comme c’est le cas sur l’Albert Lucas ou l’Hésione II (bateaux de l’IUEM). Les bouteilles Niskin peuvent aussi être placées en rosettes.
Sondes
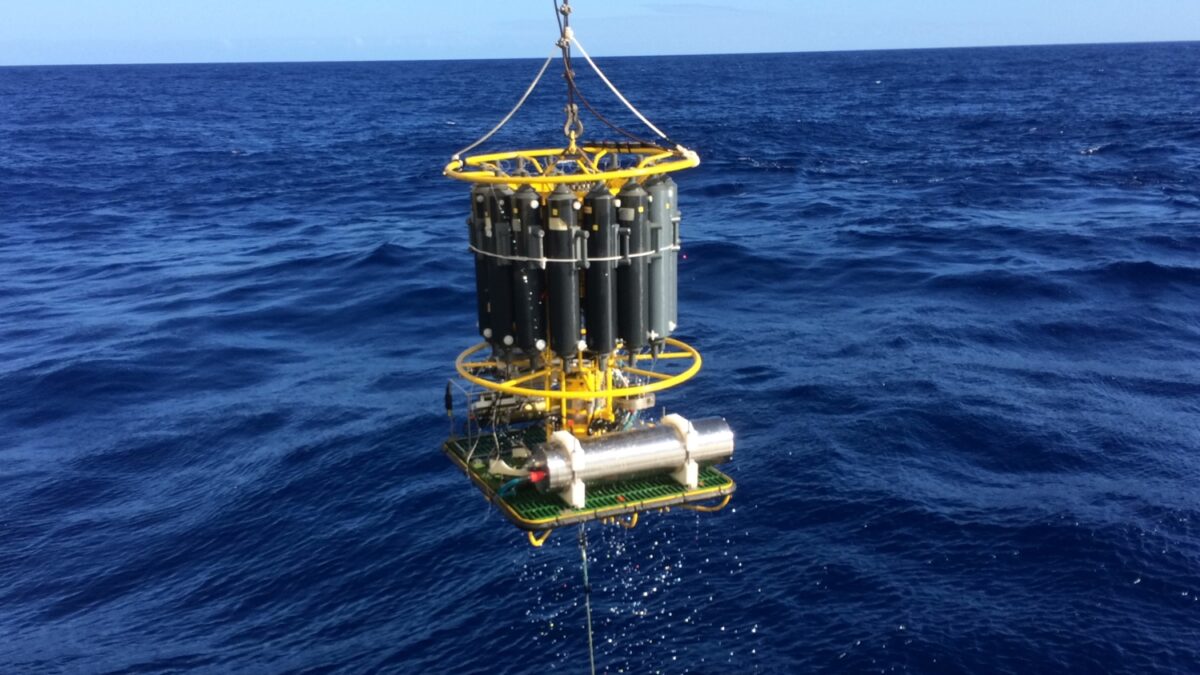
L’utilisation des sondes nous a également semblé intéressante. Par exemple, une sonde de type CTD (Conductivity Temperature Depth) est un appareil enfermé dans une cage rectangulaire en acier inoxydable, qui est descendu dans l’eau à l’aide du même câble que la bouteille Niskin et attachée un mètre sous celle-ci, rendant leur utilisation possible si le prélèvement d’eau l’est. L’instrument mesure notamment la conductivité, la température, la profondeur, l’oxygène dissous, la fluorescence et la densité. L’utilisation de sondes nous paraît donc réalisable, en s’informant en amont sur le protocole d’utilisation de la sonde désirée.
Autres

Hydrophones
Un hydrophone fonctionne comme un microphone sous-marin, convertissant la pression acoustique en un signal électrique. On peut également utiliser un réseau d’hydrophones. Ce protocole semble envisageable de par sa facilité de réalisation, mais des recherches complémentaires sont nécessaires.
Départs de drones
L’ajout de drones est une idée que nous avions eue mais que nous n’avons pas pu creuser par manque de temps. Si le bateau permet de faire décoller des drones et que ça n’entrave pas le fonctionnement du bateau alors cela pourrait être une bonne idée.
Déchargement

Le chargement et le déchargement de marchandise dépend de trois grands axes :
- Le mouillage ;
- La grue pour le déchargement ;
- Le stockage sur le port.
Pour le mouillage c’est surtout la durée qui est à prendre en compte, c’est-à-dire le temps de mouillage dans chaque port. Cela comprend le chargement et déchargement des marchandises ou bien encore le ravitaillement pour l’équipage.
Pour la grue de déchargement, il semblerait que le navire passera par des ports plus ou moins gros où il se pourrait qu’il n’y ait aucune grue pour le déchargement. L’ajout d’un treuil au bateau permettrait de pallier ce manque, tout en permettant aussi de réaliser les prélèvements d’eau ou l’immersion de sonde CTD.
Enfin, pour ce qui est du stockage, on pourrait imaginer un local proche du port où la marchandise serait déposée pour être transportée par la suite. On pourrait même envisager un local assez grand pour avoir une place pour le transporteur.
Mobilité des marchandises
À la suite du déchargement, la marchandise va être transportée chez un commerçant ou directement chez le client. Pour ce faire, deux possibilités ont été envisagées : des vélos cargo à moteur électrique ou des camionnettes électriques.

Vélo-cargo
Pour les vélos utilisés, notre choix s’est porté sur ceux compatibles avec le “Runner” de chez Fleximodal, une remorque pouvant s’accrocher à un vélo et permettant le transport de marchandise. Un vélo plus le Runner nous semble plus approprié pour des trajets plus court et avec une moins grande quantité de marchandise à transporter pour éviter les un trop grand nombre de trajet.

Camionnette
La camionnette est plus avantageuse pour la capacité de transport, pour la vitesse maximale et le temps de chargement. Celle-ci est plus utile pour transporter les marchandises sur grande distance (plus rapide et autonomie proche de celle de nombreux vélos) et lorsque la demande en marchandise est plus élevée (capacité de stockage bien meilleure).
Néanmoins, la différence de prix entre les deux est très importante, variant entre 9000€ et 13000€, ce qui peut faire pencher la balance pour les vélos cargo.
Clients, Marchandises et Partenaires
Pour l’instant nous ne pouvons pas nous projeter suffisamment en ce qui concerne les clients, les marchandises et les partenaires. Ce sera probablement à Valérie et Benoît de tenir à jour les partenariats et les clients potentiels.
 Attention, vous utilisez un navigateur peu sûr !
Attention, vous utilisez un navigateur peu sûr !