Imagerie acoustique, une cartographie en temps réel
Auteure: Judith
Tous les navires de la flotte océanographique sont équipés de plusieurs sondeurs à usages différents placés sous la coque. Certains de ces sondeurs sont essentiels et sont utilisés très régulièrement, notamment dans le cadre des campagnes MAYOBS. Cette rubrique propose de faire une description technique des sondeurs multifaisceaux (SMF) et monofaisceau ainsi que du sondeur de sédiment (SDS), utilisés lors de la campagne MAYOBS33 et comment sont utilisé les données acquises.
Principe et fonctionnement du SMF
Le principe des sondeurs repose sur l’émission d’une onde acoustique ayant une fréquence particulière. L’onde sera réfléchie sur le fond de mer puis reçu par le sondeur à son retour. En connaissant la célérité de l’onde dans l’eau de mer, c’est-à-dire la vitesse de propagation de l’onde, dépendante des paramètres physico-chimiques tels que la température, la salinité et la pression, on enregistre un temps qu’on peut transformer en une profondeur.

Les sondeurs acoustiques sont souvent constitués de céramiques piézoélectriques. Les matériaux piézoélectriques sont très utiles car ils ont la capacité de produire une tension électrique lorsqu’ils subissent une contrainte mécanique et inversement, ils peuvent se déformer lorsqu’on applique un champ électrique. Ces matériaux sont donc utilisés pour émettre et recevoir les ondes.
Pour bien « caler » les données bathymétriques (c’est-à-dire convertir les temps de propagation en profondeur), il faut connaître précisément la célérité dans la colonne d’eau. C’est pourquoi sont utilisées des sondes XBT pour « eXpandable BathyThermograph », ce qui fut le cas lors de la campagne MAYOBS 33 (Figure 1). Ces sondes bathy-thermographes (sur la mission, appelés SIPPICAN) sont larguées depuis le bateau et fournissent un profil de célérité via la mesure de la température et de la salinité. La sonde est reliée par un fil de cuivre fin au bateau pour transmettre les mesures en temps réel au PC lors de sa descente.
Figure 1. Lancement de la sonde SIPPICAN par Laëtitia, campagne MAYOBS33.
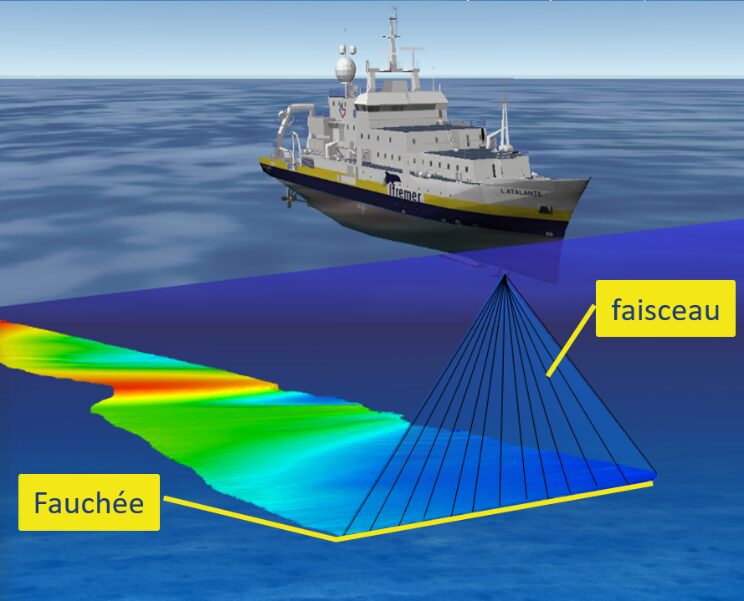
Le premier usage du SMF est la mesure de la hauteur d ’eau par l’exploitation du temps de parcours de l’onde sonore par l’émission transversale à la route du navire, déterminant une largeur de fauchée (Figure 2). Le Marion Dufresne a à disposition deux types de SMF : un premier avec une fréquence de 12 kHz, plus basse fréquence utilisée pour les plus grands fonds, et un deuxième avec des fréquences entre 70 et 110 kHz, des plus hautes fréquences utiles pour les plus petits fonds. Ce deuxième SMF est mis en route lorsque la bathymétrie est inférieure à environ 700 m.
Figure 2. Principe du sondeur multifaisceau. © Ifremer
Il faut donc trouver le bon compromis entre la résolution (meilleure avec des ondes de relativement haute fréquence) et l’absorption en fonction de la profondeur. La présence de ces deux SMF à bord du Marion Dufresne permet de moduler et d’obtenir des données bathymétriques de bonnes résolutions pour tous types de fonds. Au cours des campagnes MAYOBS, les données bathymétriques sont comparées pour prévenir des changements liés à des apports de magma par exemple, et doivent être donc très bien calées entre elles (voir rubrique Traitement).
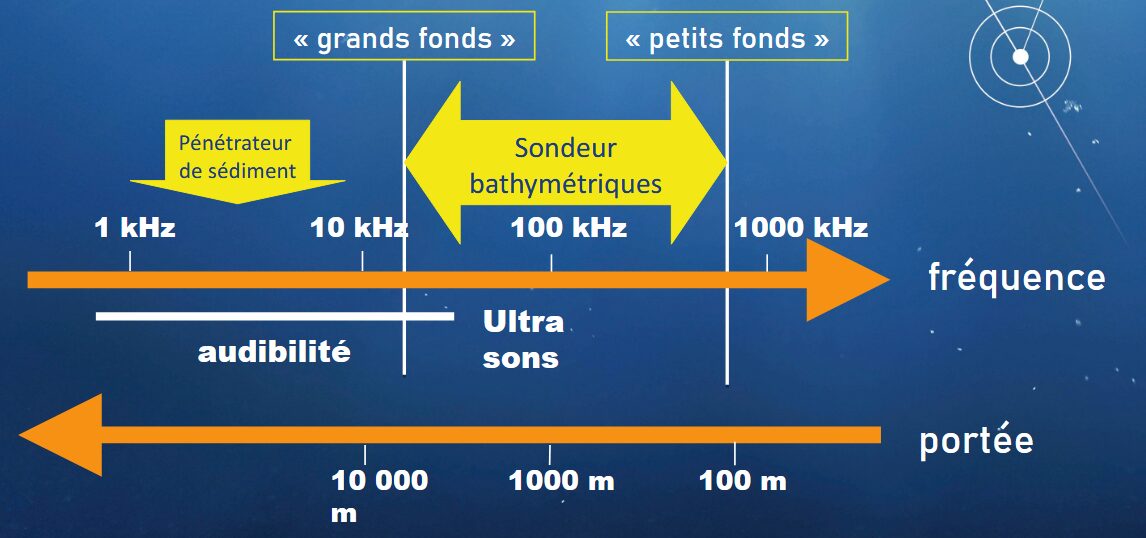
Les plus basses fréquences sont utilisées pour les plus grand fonds car lors du passage de l’onde dans la colonne d’eau, il y a une atténuation des ondes liée à leur absorption. Donc quand la fréquence augmente, le coefficient d’absorption augmente et la portée diminue (Figure 3).
Figure 3. Echelles de la portée en fonction des fréquence utilisées par les différents sondeurs. Source : Arnaud Gaillot (Ifremer)
Le SMF est également utilisé pour ce qu’on appelle la réflectivité (ou backscattering). Le fond a la capacité de réfléchir l’énergie sonore mais la rétrodiffusion de l’onde et l’intensité de cette rétrodiffusion vont dépendre, en partie, de la nature du fond. Grâce aux données de réflectivité, on peut donc avoir une idée de la géologie du fond : si la rétrodiffusion est forte, le substrat sera plus « dur » et inversement, si la rétrodiffusion est faible, l’onde a été transmise dans le milieu et le substrat est plus « mou ».
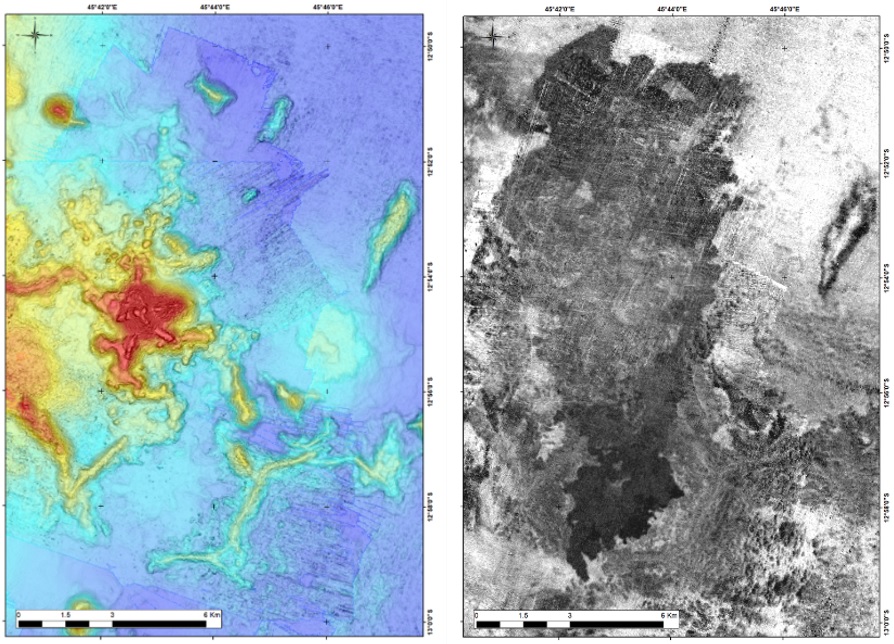
Dans le cas des campagnes MAYOBS, les fonds « mous » peuvent être interprétés comme des fonds sédimentaires, voir vaseux, tandis que les fonds « durs » peuvent être interprétés comme des fonds de nature volcanique. La distinction des deux types de fonds a permis de mettre en évidence la progression des laves émises par le nouveau volcan Fani Maoré (Figure 4).
Figure 4. Cartes des données SMF et de réflectivité sur la zone du Fani Maoré. Source : campagnes MAYOBS (Rinnert et al, 2019 ; Feuillet et al., 2021). Voir aussi le séminaire de Fabien Paquet.
Un autre usage des données SMF est l’acquisition des données de « colonne d’eau » qui correspond à exploiter l’amplitude des échos le long du trajet des ondes acoustiques dans la colonne d’eau à travers une analyse qualitative. Lors de son trajet, l’onde émise peut rencontrer des « obstacles ». Ces obstacles peuvent être de la vie sous-marine (bancs de poisson) mais surtout la présence de gaz.
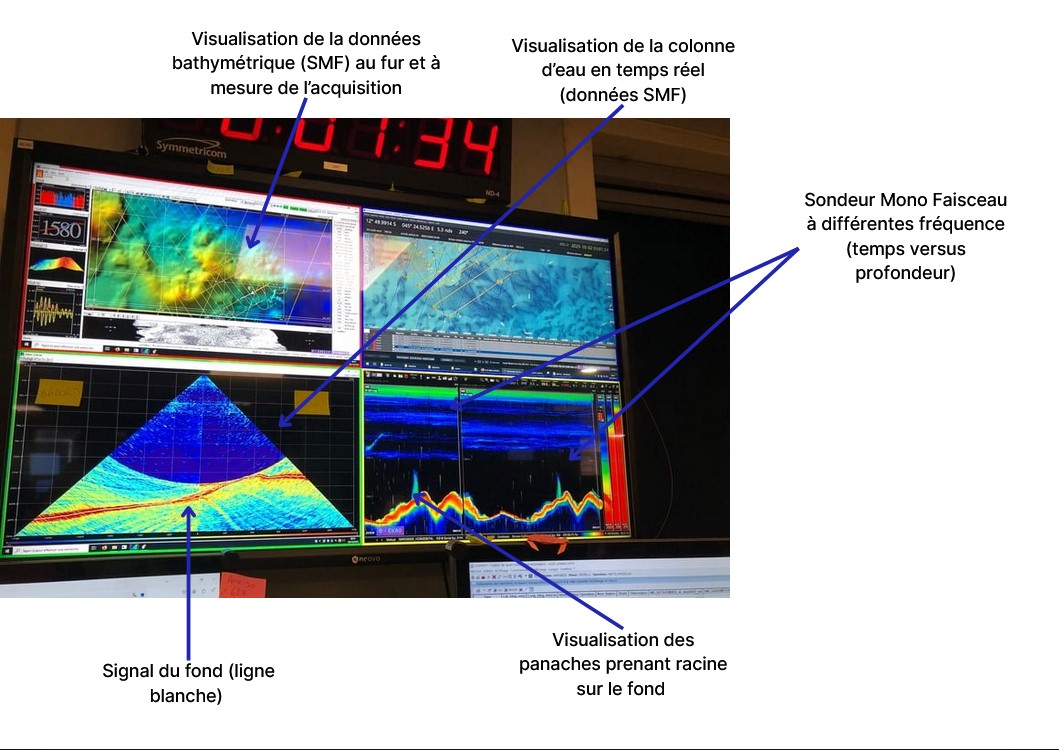
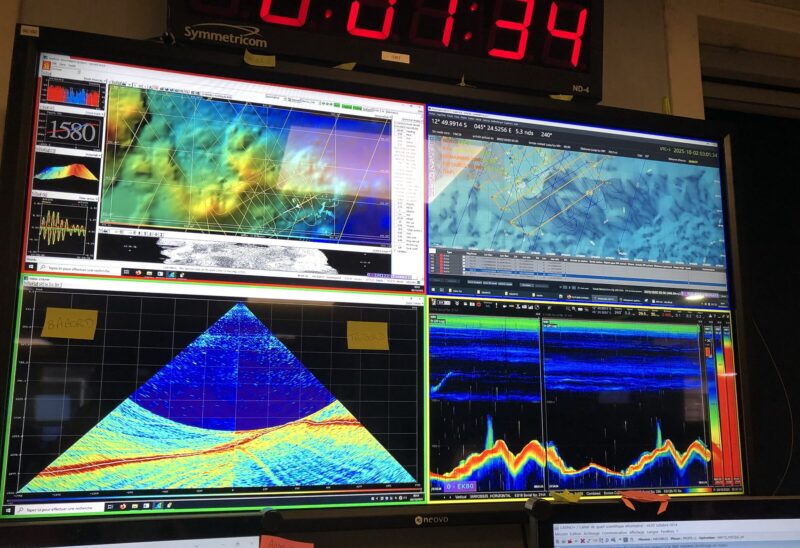
Dans le cadre des campagnes MAYOBS, une grande attention est portée au suivi des panaches (sorties de gaz), notamment dans la zone du Fer à Cheval (voir le Journal de bord « A travers les panaches »). En effet, ces données de colonne d’eau sont cruciales pour surveiller l’activité volcanique sous-marine près de Mayotte. Elles nécessitent un contrôle permanent en temps réel sur les écrans (Figure 5).
Figure 5. Visualisation en temps réel des données SMF et monofaisceau (EM122 et EK80) pendant un quart scientifique. Crédit photo Judith
Principe et fonctionnement du Sondeur Monofaisceau
Le sondeur monofaisceau repose sur le même principe que le SMF mais au lieu d’envoyer plusieurs faisceaux, on va « regarder » à la verticale sous le bateau avec un seul et unique faisceau.
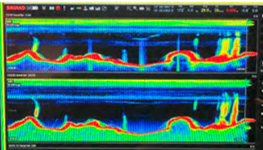
Les données acquises vont se présenter sous la forme d’un graphe en temps versus profondeur et l’observation des données est dédiée à l’observation des sorties de fluides comme les panaches par exemple pour la campagne MAYOBS33 (Figure 6).
L’intérêt du sondeur monofaisceau, en plus du SMF et de la colonne d’eau, est de bien distinguer les différents panaches et leur racine quand les panaches sont très rapprochés notamment, c’est pourquoi on va passer plusieurs fois au-dessus de ces panaches pendant la mission.
Figure 6. Profil d’acquisition au sondeur monofaisceau EK80, Fer à Cheval, Campagne MAYOBS25. Remarquer la présence de nombreux panaches dans la colonne d’eau.
Traitement des données acoustiques
A bord de la campagne MAYOBS33 c’est Olivier qui s’occupe du traitement des données bathymétriques (Figure 7). Olivier est technicien dans l’équipe Genavir, armateur principal de la Flotte Océanographique Française, dont une des missions est « l’acquisition, la qualification et le traitement des données océanographiques ». Olivier a pour objectif de fournir à la fin de la campagne des cartes bathymétriques résolues et « propres », c’est-à-dire sans artefacts qui pourrait brouiller l’interprétation des données.
Figure 7. Olivier en train de faire le traitement des données SMF acquises pendant la campagne MAYOBS33. © Judith
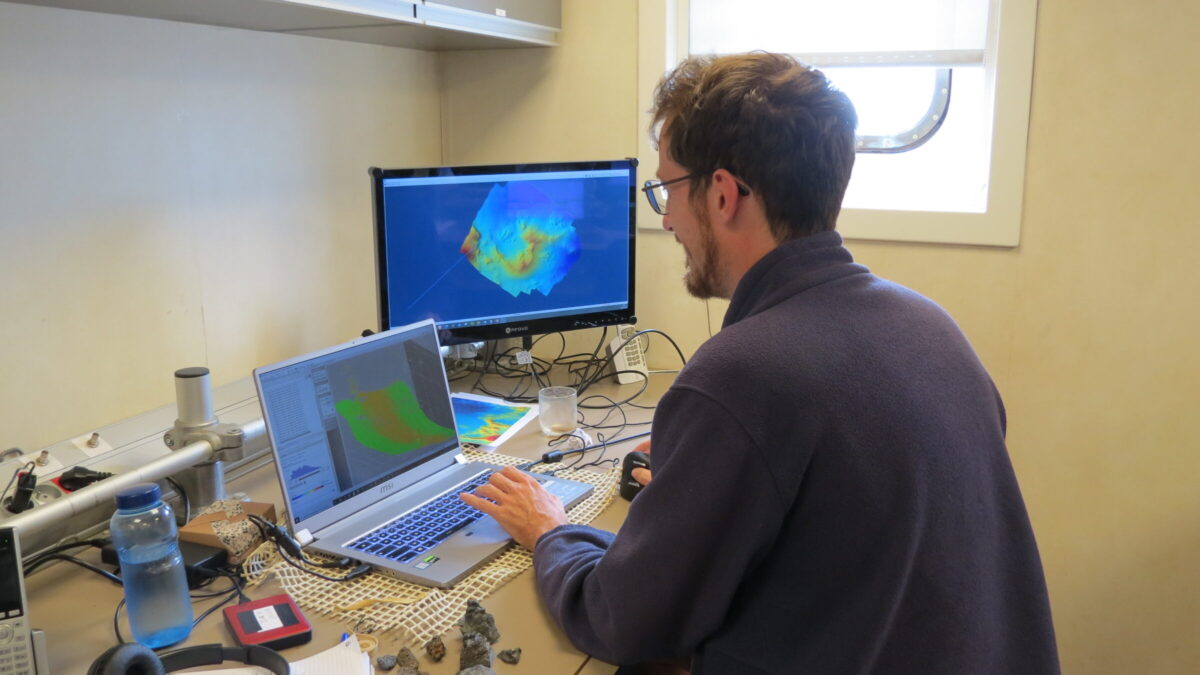
Il utilise le logiciel Globe (GLobal Oceanographic Bathymetry Explorer), développé par Ifremer, sur lequel il est possible de visualiser tous les points enregistrés par le sondeur pour distinguer les points aberrants par exemple. Le logiciel permet d’effectuer d’autres traitement via différents modules notamment la correction de marée. Le traitement des données bathymétriques et un travail long et répétitif mais essentiel. A travers un autre module de traitement dans le logiciel Globe, on peut afficher et rejouer les données acoustiques de la colonne d’eau, utilisé sur la campagne par Anne-Solène pour pointer la racine des panaches et les cartographier dans la zone du Fer à Cheval.
Le sondeur de sédiment (SDS)
Le Marion Dufresne est aussi équipé d’un sondeur de sédiments (SDS) qui est un autre équipement acoustique. Le SDS permet de visualiser les séries et l’architecture sédimentaire sur plusieurs dizaines de mètres sous la surface du fond marin avec une résolution verticale de l’ordre d’une dizaine de centimètres (Figure 8).
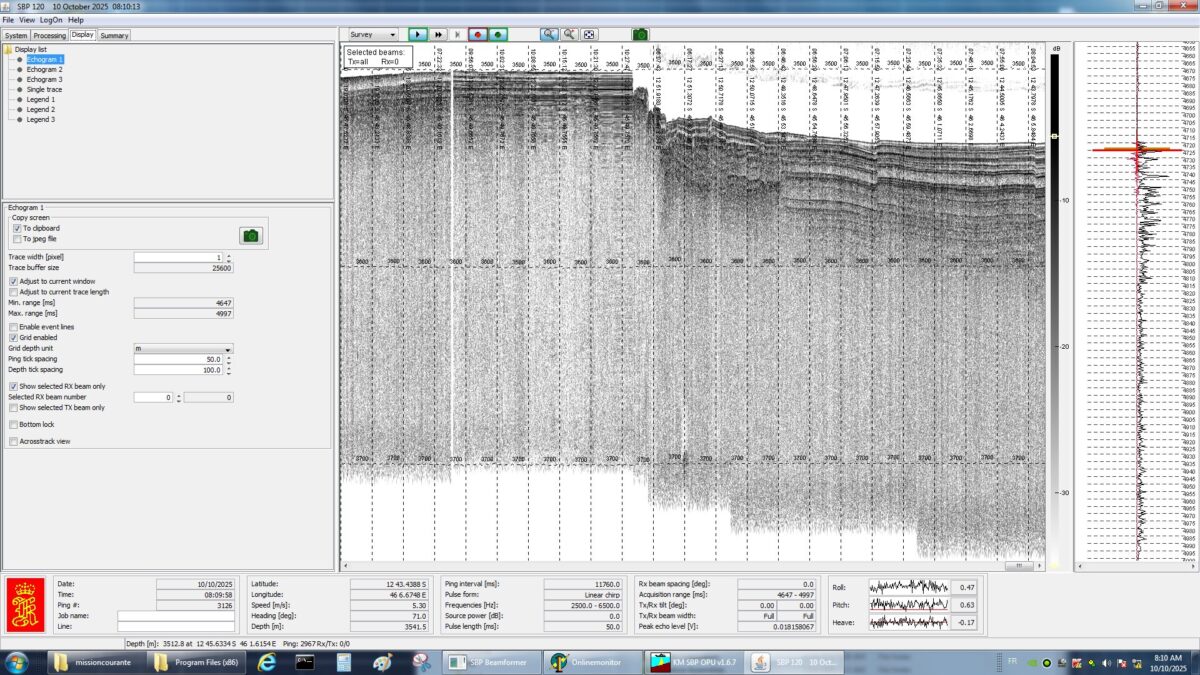
Le SDS exploite des fréquences entre 2.5 et 7 kHz et le signal reçu consiste en une série temporelle d’échos réfléchis sur les interfaces sédimentaires. Le sondeur est mis en route lors de long profil notamment pendant les transits. En effet sur la zone de travail, entre le volcan et le Fer à Cheval, le substrat est plutôt volcanique et les ondes pénètrent peu (beaucoup de réflexion).
Figure 8. Capture d’écran de l’acquisition du sondeur de sédiments au cours d’un profil. Campagne MAYOBS33. © Judith
| Sondeur | EM122 (Sondeur Multi Faisceaux) | EM710 (Sondeur Multi Faisceaux) | EK80 (Mono Faisceau large bande) | Sondeur de sédiments |
| Constructeur | Kongsberg | Kongsberg | Kongsberg | |
| Fréquence | 12 kHz | 70 – 110 kHz | 38,70,120,200 kHz | 2.5 à 7 kHz |
| Profondeur max de mise en route | 12 000 m | 1500 m | 2450, 1270, 750, 550 (portée max pou le fond en mètres) | Pas de max mais limité quand le fond est rocheux et « dur » |
| Faisceaux | 288 | 256 | ||
| Fauchée | 140° (20 km max) | 140° (2 km max) |
Références citées (site de la Flotte Océanographique)
 Attention, vous utilisez un navigateur peu sûr !
Attention, vous utilisez un navigateur peu sûr !