Hydrophones, une écoute « so far »

Introduction
Dans le cadre du réseau de surveillance MAYOBS, 4 mouillages équipés d’hydrophones ont été installés. Ces capteurs enregistrent les sons sous-marins, et un traitement de ces signaux permet de localiser et d’étudier différents types d’événements, du séisme aux chants de baleines.
Le Canal SOFAR
L’océan n’est pas une masse uniforme d’eau, et ses propriétés varient en fonction par exemple de la position dans l’espace, de la température, de la profondeur… Une de ces propriétés est la vitesse de diffusion du son dans l’eau, qui varie beaucoup notamment en fonction de la profondeur à laquelle nous la mesurons.
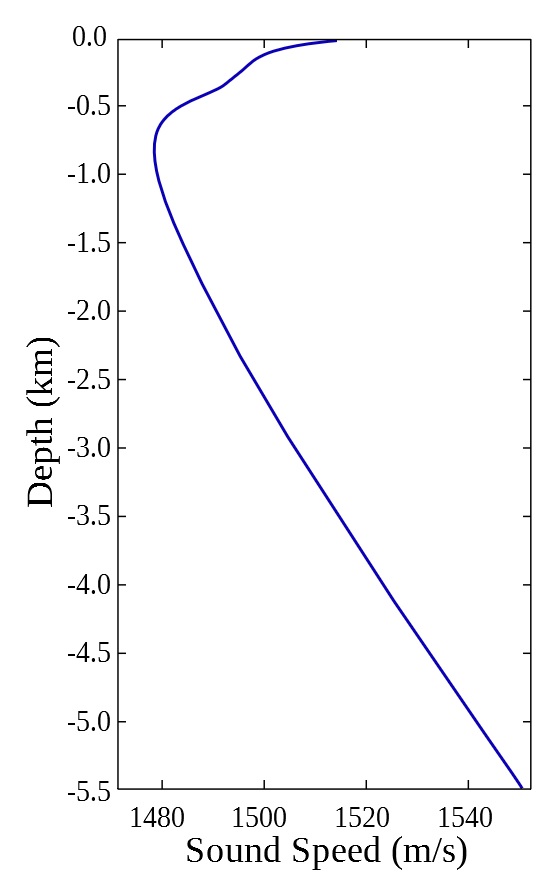
On voit sur la Figure 1 que généralement, cette vitesse est d’abord assez élevée près de la surface de l’eau, décroît jusqu’à atteindre un minimum (ici vers 750 m de profondeur), puis ré-augmente progressivement. La zone où cette vitesse est minimale présente un certain intérêt dans le suivi des sons sous-marins: en effet, cette vitesse basse implique que les sons passant dans cette zone vont moins se diffuser dans toutes les directions et se retrouvent en quelques sorte “piégés” dans un canal acoustique, appelé “canal SOFAR”, dans lequel ils vont ainsi se propager sur de très grandes distances (des milliers de kilomètres) en conservant une certaine amplitude (Figure 1).
Figure 1. Vitesse du son en fonction de la profondeur de l’eau. D’après Nicoguaro – Site: SOFAR CC BY-SA 4.0
Placer des capteurs dans cette zone permet donc de surveiller les sons sous-marins de zones très étendues et d’en tirer des informations sur leur nature, leur fréquence et leur localisation.
Les mouillages d’hydrophones
Plusieurs types de mouillage sont déployés, mais leur principe général reste assez similaire.
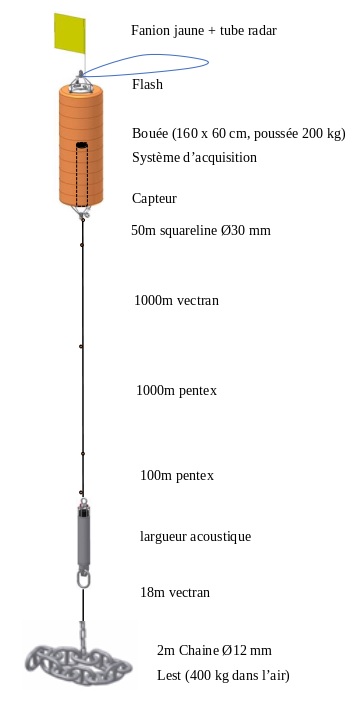
Le mouillage est constitué d’un lest, d’une ligne le reliant à un hydrophone lui-même attaché à une bouée (Figure 2). La longueur de la ligne permet de définir la profondeur du capteur, et donc de le placer dans le canal SOFAR afin de couvrir une zone aussi large que possible. La station de mesure est constituée d’un hydrophone et d’une électronique d’acquisition pour enregistrer les sons de fréquence 1 Hz à 125 Hz.
Figure 2. Schéma d’une ligne de mouillage classique (programme MAHY) – © Jonathan Tanrin
Dans le cas de la campagne MAYOBS, la station est positionnée à 1300 m de profondeur. Le capteur en lui-même est installé sous la bouée, qui elle contient le matériel d’enregistrement (disque dur, mémoire vive) et autres composants électroniques. Sur la ligne se trouve un largueur équipé d’un transpondeur permettant de communiquer avec la surface. Une fois déployé, l’hydrophone va commencer à enregistrer tous les sons sous-marins qu’il détecte, et ce jusqu’à sa récupération ou, dans le pire des cas, la fin de son autonomie en batterie. L’appareil étant profondément immergé, il ne peut pas communiquer ses données en temps réel. Afin de traiter ces données, il faut donc récupérer (au moins en partie) l’appareil afin d’y avoir accès.
L’approche habituelle est d’envoyer un signal via le transpondeur au largueur afin de lâcher le lest et faire remonter le reste. Il faut ensuite surveiller la surface de l’eau pour essayer d’apercevoir la bouée marquant l’hydrophone, puis envoyer des gens pour la récupérer. Toutefois cette méthode habituelle n’est pas sans inconvénient. En effet, un mouillage est assez lourd (plusieurs centaines de kilogrammes) et nécessite donc des bateaux relativement gros pour le récupérer. De plus, les informations récoltées par ce mouillage ne sont récupérables qu’une seule fois avant de devoir remettre à l’eau: un nouveau mouillage va donc devoir se dérouler en général un an plus tard. Des coûts assez importants sont donc générés, et des bateaux autre que dans le cadre de missions océanographiques ne peuvent que difficilement aider à la récupération.
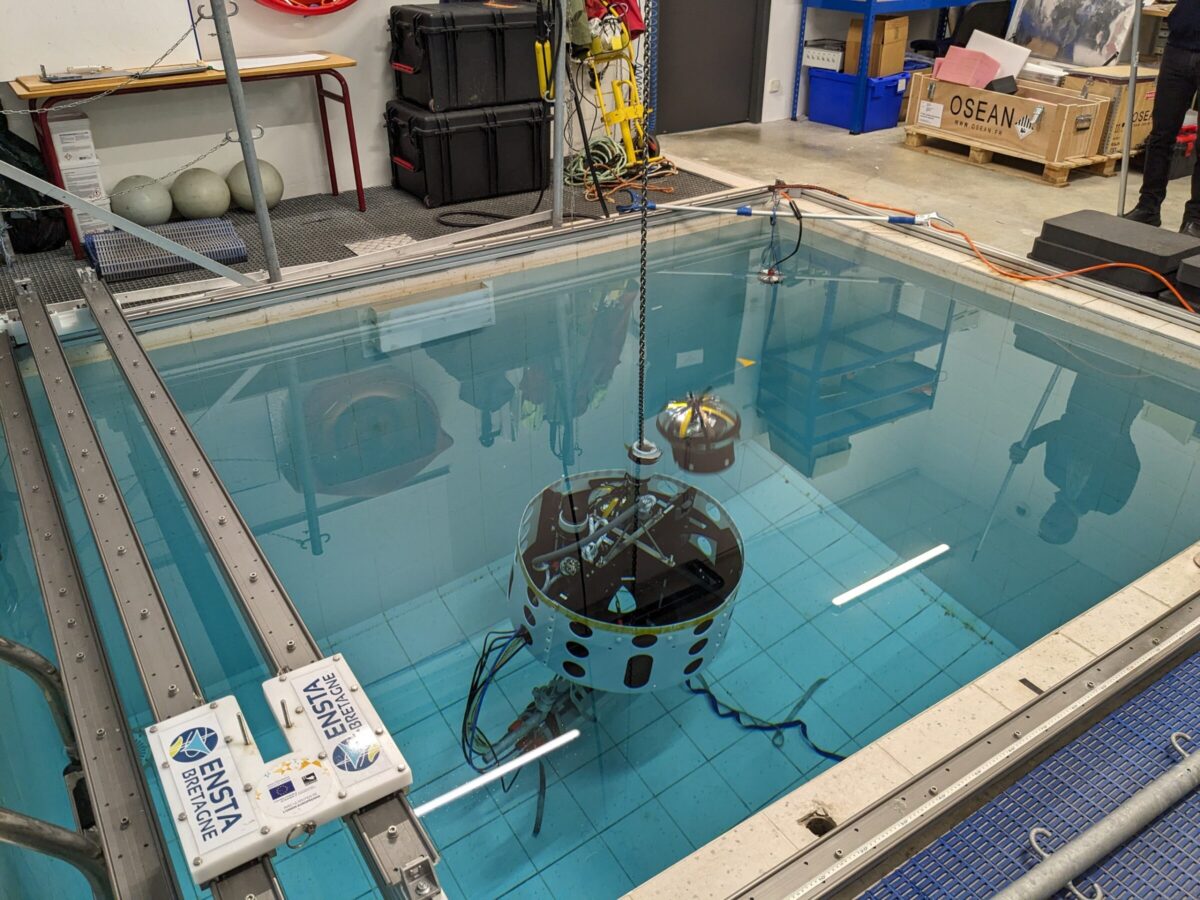
Pour pallier ces défauts, un nouveau modèle d’hydrophone a été développé et récupéré pour la première fois avec succès à l’occasion de la campagne MAYOBS33. Les premiers tests avaient étés effectués en piscine (Figure 3).
Figure 3. Essai en piscine sur une ligne d’hydrophone à l’ENSTA, site de Brest. L’objet flottant est une navette permettant de récupérer une partie des données sans relever toute la station. © Jonathan Tanrin
Cet hydrophone est assez similaire sur beaucoup d’aspects aux précédents, avec une partie flottante d’environ 300 kg pour 2 m de haut et 1,50 m de diamètre (Figure 4). La particularité se trouve dans le mode de récupération des données. Le mouillage est augmenté de trois navettes de récupération des données, consistant en des sphères de verre transparent reliées à la partie principale, largables à distance et contenant des disques enregistrant les données de l’hydrophone (Figure 2).
Figure 4. Le nouvel hydrophone. Dans la capsule noires, se trouvent les 3 navettes (sphères en verre) © Jonathan Tanrin


Quand l’appareil reçoit un signal via le transpondeur lui indiquant le besoin de récupération des données, une de ces navettes est libérée et remonte à la surface. Une lampe à l’intérieur émet des flashs réguliers permettant de voir et récupérer la navette à la surface de l’eau même de nuit, ou à l’aube comme ça a été le cas pour la première récupérée avec succès lors de la campagne MAYOBS33 (Figure 5).
Figure 5. Récupération d’une navette (petite sphère en verre visible dans le “work-boat”) lors de la campagne MAYOBS33. © Judith
Ainsi, les multiples navettes permettent de laisser le mouillage en place durant quatre ans: trois pendant lesquels on récupère les navettes, puis la dernière année pour la récupération du mouillage entier qui enregistre également les données. De plus, la récupération de ces petites navettes peut se faire beaucoup plus facilement, notamment à l’aide de bateaux “d’opportunité”, par exemple des pêcheurs passant dans la zone ou de petites embarcations. Ces nouveaux hydrophones vont donc permettre de récupérer des données plus facilement et à moindre coût.
Le traitement des données
Une fois récupérées, les données vont être traitées afin d’essayer de détecter et d’analyser des événements sous-marins. Pour ce faire, un spectrogramme des données est généré, c’est-à-dire un diagramme représentant l’évolution des fréquences en Hz dans les bruits sous-marins au cours du temps, ainsi que leur intensité en Pa (Figure 6).
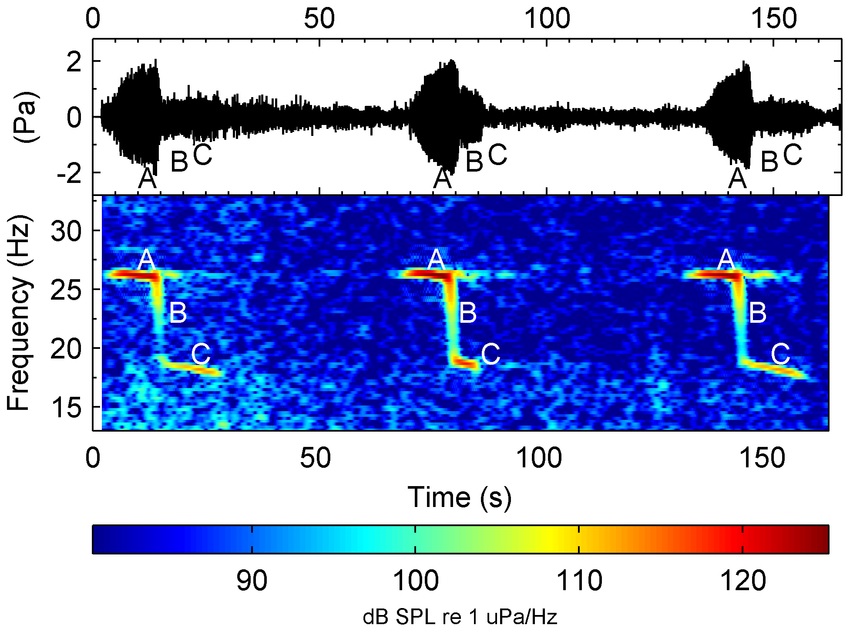
Cette représentation nous donne une manière visuelle de rapidement repérer différents sons qui se distinguent du bruit de fond. En effet, les événements ont tendance à avoir des formes caractéristiques sur ce spectrogramme, ce qui va permettre de les classifier visuellement. Par exemple, un chant de baleine (son 1) aura une forme rappelant un Z (Figure 6).
Figure 6. Spectrogramme d’un chant de baleine. Extrait de Miller et al. (2014).
Le fait d’avoir quatre mouillages dans la même zone offre aussi un autre avantage. En effet, si un signal est détecté par au moins trois d’entre eux, il va être possible d’utiliser l’information d’intensité/délai détectée par chacun ainsi que sa position pour avoir une idée de la localisation de l’émission du signal par triangulation.
Ces appareils permettent donc de suivre beaucoup de phénomènes sous-marins, notamment sismiques, et les données récoltées sont utiles à beaucoup de domaines scientifiques différents.
 Attention, vous utilisez un navigateur peu sûr !
Attention, vous utilisez un navigateur peu sûr !